ティアフォーはこのほど、高速道路のトラック輸送における自動運転システムを開発し、2024年度から新東名高速で同システムの実証実験を開始すると発表した。自動運転の早期普及を支援する同社の試みとは? そのあらましを紹介していこう。
文/トラックマガジン「フルロード」編集部、写真/ティアフォー
自動運転トラックの実証実験の概要

ティアフォーは「自動運転の民主化」をビジョンに掲げ、世界初のオープンソースの自動運転ソフトウェア「Autoware」の開発を主導し、自動運転システムの社会実装を推進している企業だ。
商用車分野では、これまでバスを主体とした自動運転システムの開発を行なっており、23年度にはレベル4相当の自動運転技術を搭載したバス「ティアフォーMinibus」を導入した実証実験を全国23カ所で実施したほか、2024年3月にはいすゞ自動車と路線バスにおける自動運転システム開発で協業することを発表した。
いっぽう、人手不足などの課題を抱える物流危機の対策として、このほど高速道路トラック向け自動運転システムの基本機能を開発。2024年度から新東名高速道路での実証実験を開始すると発表した。
またこの開発成果は、リファレンスデザインとして商用車メーカーへ提供し、高速道路トラックへの自動運転機能の早期導入を支援するほか、自動運転支援道やデータ連携基盤を含むインフラの活用にも貢献し、物流業界におけるデジタル化の推進を図るとしている。
なお、開発成果となるリファレンスデザインには、Autowareの基本機能に加え、2024年4月に開始した「TIER IV Autoware Partner Program」の参画企業との協業で得られる高速道路トラックに特化した機能が含まれるという。
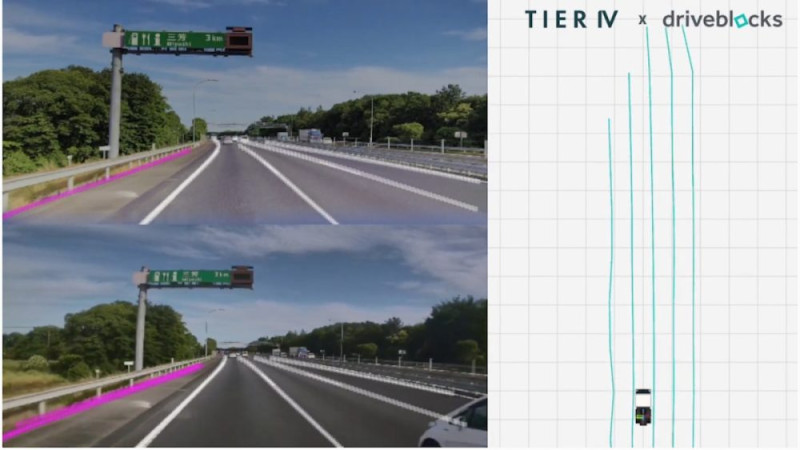
今回の実証実験では、ドイツのドライブブロックス社の高精度地図を必要としない認識技術「Mapless Autonomy Platform」を活用して自動運転システムの開発が進められる予定で、両社の技術の統合により、高速道路の工事や新設区間など、高精度地図の未整備や最新データの未反映がある場合でも、冗長性と安全性の高い自動運転の実現が可能となる。
なおこの認識技術は、すでに欧州のブレンナー峠など走行難易度の高い環境で有効性が実証されており、国内では新東名高速道路を想定したテストコースおよびシミュレーション環境を活用して検証が進んでいる。
2024年度内の実証実験に向けて両社は、高速道路走行の一般的なシナリオに加えて、衛星測位システムが利用できないトンネルや低照度の環境など、さまざまなシナリオ下で時速100kmでの正確な認識機能の動作検証や走行車線のモデル作成を完了させ、リファレンスデザインとして提供を予定する。
また、ティアフォーでは、高速道路トラックが合流車両や障害物などの周囲を認識し、安全に走行できるよう、物体検出機能の向上にも注力するとしている。
鄭重声明:本文の著作権は原作者に帰属します。記事の転載は情報の伝達のみを目的としており、投資の助言を構成するものではありません。もし侵害行為があれば、すぐにご連絡ください。修正または削除いたします。ありがとうございます。





![[音のプロが推す“超納得”スタートプラン]中級スピーカーをサクっと装着! 高級純正システム搭載車にはデッドニングが効く!](/uploads/images/20240505/234407327b13be62d3.jpg)